0 引言
目前,加工和生产电子芯片和产品(如移动电话, 手提电脑和芯片等) 需要高精度和高速度的装配生产线,要求执行装配器能够提供二维甚至三维的运动。
而且还要满足一定的位置精度,可靠性好和提供较高的加速减速的需求。工业上,通常应用旋转永磁无刷电机,进行机械轴上的耦合,从而将曲线运动转变成直线运动。相对来说,这样的设备比较容易控制,而且这样的设备和配件都已经形成标准。然而,由于机械部件较复杂,加工和维修的费用很高,并且存在校准手续复杂,可靠性差,和无法在恶劣环境中运作等弊病。
图1 展示了常用的由两个直线滑轨层叠形成的X-Y平面工作台。它的工作精度和性能大部分取决于机械参数,比如滚珠的安排,滚珠和螺母,导轨与滚珠间的配合,和电机之间的平直程度。尤其是如果加工的复杂程度增加,必然导致精度要求的进一步提高。生产迪卡尔坐标运动系统的成本随着生产精度的要求呈指数关系增长。大部分的成本花费在高精度机械部件的生产,机械校准的程序和日常的维护费用上面。降低成本和提高性能最有效的办法是去除复杂的机械结构和耦合装置。本文中,作者提出一些设计自动化设备的新方案。对于未来高性能的仪器,以下两个方面值得借鉴:
图1 传统的XY工作台的外型构造及直线导轨内部结构
1. 用直接驱动的运动执行器,替代机械上的耦合和运动方式变换器[10],即便要付出非线性控制上的代价。
2. 应用智能和鲁棒控制技术来克服机械和电子上的非线性。
上面的指导思想是基于这样的事实得出的结论,那就是功能强大的伺服控制器的价格将越来越便宜,而高精度部件的生产和加工技术将变得越来越昂贵。将复杂的运动要求用软件去实现从而代替机械上的硬件一般是比较有效的。
为了进一步减少执行部件的成本和设计的复杂程度,本文提出基于开关磁阻原理的执行设备。开关磁阻电机具有鲁棒性好,结构简单等特点,而且其加工费用远远低于同类的无刷直流电动机和交流电机。由于它具有在较小的极距空间中容纳较多的极子的特点,使得它可以作为直接驱动的设备。再有,它可以制造成不同的结构和形态适应不同场合的要求,而不只是局限于旋转电机。
图2(a)及图2(b)分别是直线和旋转开关磁阻执行器。当通入电流流过线圈时,产生磁通。磁通就像“一只无形的手”一样,它将尽可能
地缩短磁路和活塞间的空气隙的距离。对于旋转的情形,通电后,动子将顺势旋转与定子极完全对齐为止。同样,对于直线的情况,活塞将向上运动直至与上端相接触。这里所描述的可变磁阻执行器是最简单鲁棒性最好的电机。它不包括任何永磁体,鼠笼结构或是换向器。
目前,主要应用于日常的开/关设备中(车锁,洗衣机中的截水阀等等)。但是,开关磁阻具有磁和电方面的非线性控制的非线性化特点,因而它不能用作比例执行机构。与无刷直流电机和交流同步电机相比,它更难进行控制。控制的因素绝大部分取决于其磁通的分布特性,然而磁通却是非线性的参数。虽然如此,在过去几年中,确实有一部分致力于对开关磁阻线性执行器的研究[3] , 这要归功于高速电子开关,计算设备和高级控制理论的发展。
图2 开关磁阻执行器工作原理(直线和旋转)
近些年来,很多文章都是致力于旋转的多相开关磁阻电机的研究 [2] 。香港理工大学电力电子研究中心开发了一些高性能的用于运动
控制的开关磁阻执行机构。其中包括:(机器人)手指抓取器,人造关节,直线磁阻电机,和平面磁阻电机。本文中,作者将按顺序详细
介绍每一个科研项目,并且讨论它们各自在高性能的机器人结构中的应用。在本文的最后,将简要介绍开关磁阻执行器的控制方案。
1 数学模型
开关磁阻执行器在电特性上具有严重的非线性,而且主要取决于实际的机械结构[4]。但仍可以按下列状态方程描述:


图3(a) 磁链相对于位置和电流曲线
(b) 力相对于位置和电流曲线
为了抵消这些非线性的因素,必须应用相应的非线性化解耦和补偿方案 [5] 。本文第4部分有相关论述。
2 直接驱动开关磁阻执行器
直接驱动的执行器应用开关磁阻原理的一大优点是能够根据需要将其制作成所需的形状。如下所介绍的4种:
1. (机器人)手指抓取器;
2. 人造关节;
3. 直线电机;
4. 平面电机。
每一个仪器具有其本身特色,控制特点和应用领域。然而,就开关磁阻的原理而言,控制的方法是相似的。 .
2.1 (机器人)手指抓取器
手指抓取器用于机器人领域[8],图4是它的实际结构。其中包含了两个旋转部件,每个都和一个执行受动器相连。执行部分包括两个线圈,各自为相应的受动器提供力矩。每个移动的转子都连接在各自的轴上,从而运动机构可以自由地移动于定子的极间。图5显示了总体结构。该执行器鲁棒性好,结构简单,并适用于危险的环境中。由于不包含永磁体,加工成本和难度都大大降低。自感和互感参数在制造过程中已经进行过测量,并应用三阶差值函数差值。控制方案采用双模式位置/力控制策略。在目前的研究中,该设备具有0.5的角度精度和5mN的力精度。最大抓取力达到大约8N。它已被测试于高速和高精度的抓取多种精密或脆弱物件的应用中。

.2.2 人造关节
开关磁阻原理可以应用于人造关节的制造上。直接驱动旋转关节对机器人的结构建造上有很大的用处。图5显示了整体结构和实际形态。它包含了两个线圈和居于中心的层叠板,层叠板作为运动的电机部分。磁路走向由两个线圈控制,各自提供与对方方向相反的力矩。最大旋转角度为90o 。基板由两部分组成;一部分负责顺时针方向的转距,另一个负责逆时针方向。每个线圈负责各自的旋转部分。每个部分是层叠结构,一端固定,中间是转子部分而另一端是磁回路(由Carpenter 430FR型金属条板提供)。整体结构十分简单,而且可以根据需要制成人的手指形状。通过单独控制各自线圈的导通和关断,可以让它跟随不同的运动轨迹,提供不同的抓取力或者以不同的力度停留在某个位置上保持静止。

2.3 直线磁阻电机
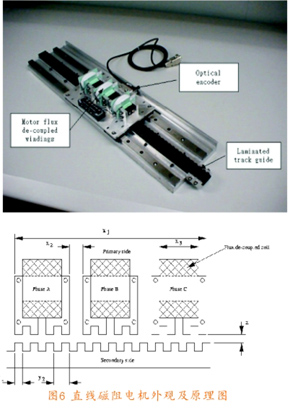
图6是直线电机的结构图。该电机已经在以下方面进行过优化:
出力/尺寸比;
力波动;
磁漏和涡流损耗;
动态输出特性。
该电机安装在精确的直线导轨上。三项线圈组装在动子上,并相隔120o由于线圈互相之间是完全磁通解耦的,三项线圈各自独立,互不影响,而且项间不具备互感影响。这种新型的电气结构简化了模型分析并且提高了系统的鲁棒性。该设备可以以较好的性能工作于较恶劣的环境。目前,位置控制精确度达到0.8μm, 具有3.5个自由落体加速度。电机的驱动控制器目前还没有使电机工作在饱和区。预计下一代的
控制方案和控制器将使电机工作在饱和区,从而进一步提高输出效率。
2.4 平面磁阻电动机
平面组电动机具有二维空间的延展性。它可以在X方向,同时和Y的方向上产生力。二维空间运行在工业生产中有着极高的需求。新型的平面结构可以完全替代传统的X-Y工作台。在机械上结构简单,部件很少,而且易于加工和制造。但目前需要解决的困难不光是在执行部件的结构上的设计,位置传感器二维传感,而且包括非线性控制方法和PWM 电流驱动器上。图7(a)是该电机的外观图,它是基于6/4的型旋转磁阻电机,经过平面延展,形成二维平面的运动结构。动子平台上安装两组3项线圈和较宽的动子齿。齿的宽度保证两个方向的力的耦合达到最小。在对该电机进行设计时用到有限元分析分析软件。定子“齿型”结构请参看图7(b)。基座是由分层的导磁钢片在两个方向上叠加而成。精度为一个μm 的直线位置解码器分别安装在两个方向的移动导轨上。
| 功率输出(X&Y方向) |
80—100W |
移动距离 |
300mm×300mm |
| 控制精度 |
2.5micron |
加速度/减速度 |
>5个自由落体(0.5公斤负载) |
| 极间距 |
6mm |
最大负载 |
5kg |
| 位置精度 |
±2micron |
基座尺寸 |
450mm×450mm |
目前该电机还处于最终试制阶段。通过有限元分析,可以证实无论从固有特性和控制策略上,这个平面电机与直线电机有很多的共同点。表1 是它的性能参数。
3 平面电机的控制方案
开关磁阻执行机构具有非线性的特点,也就是说力/力矩输出相对于位置和电流呈非线性关系。为了纠正其非线性,控制器必须包含一个力/电流的二维表。通常可变磁阻电机运行于位置和力的调节模式下,因此常采用双模式控制策略。图8是典型的控制器框图。
采用分级闭环控制。控制器内环包含一个快速的电流调节器和慢速的位置调节器在外环。外环采用自适应PI调节器;在位置控制器和电流控制器之间的是非线性的二维表。表位于两个控制器之间。它接收来自控制器的力的命令和位置信息,输出所需的电流值给电流控制器。该双闭环分级运行是以电流控制器能够正确地进行跟踪为基本前提的。只要电流内环跟踪正确,外环给定的位置指令将取决于内环,最后将指令送给电机。若电机运行于位置和力的控制模式之下,建议采用模式切换机制。该切换模式对输入的力命令在轨迹控制器和力产生器之间进行选择。

4. 结语
高性能低成本的机器可以由可变磁阻为原理的直接驱动执行器和“利用特种驱动的执行器和高级控制方案简化机械结构”的理念来实现。在本文中所描述的特种开关磁阻电机成本低,鲁棒性强和可靠性好,无需繁琐的机械校准工作,而且容易加工制造。这些优点将最终取代包含很多旋转电机和机械螺钉组成的X-Y工作台。
当应用上述的电机所组成的仪器进行电子设备和零件(手提电脑,半导体设备芯片等)的加工时,生产成本也将随之大大降低。甚至可以将它们用于那些由于条件所限从未付诸实施的应用中。上述的直接驱动开关磁阻电机将对自动化工业做出贡献,所研究的重点是如何利用有限的人力物力成本制造高科技含量价值的高、精、尖产品。
致谢
本文作者在此感谢香港大学基金会和香港理工大学研究委员会对本项目(PolyU 5066 /01E and G-T223)所提供的支持和帮助。 |