















产品详情
建筑幕墙打胶机器人设计制造
非标幕墙涂胶机器人设计方案
一、机器人运动机构解决
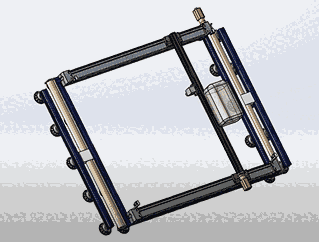
应用海特林科技自有的吸附爬行技术和落地原理,同时考虑成本核算,本涂胶机器人采用单框架双滑杆交替推移运动,吸盘通过PLC控制交替吸附、上下推移和定位。
海特林多种吸附爬行非标机构
一、机器人定位解决
涂胶机器人不同于建筑外表面保洁的工作,需要精准的机器人坐标定位技术,定位与硬稳固,是涂胶动作精准的保证;机器人吸附固定后涂胶动作之前,机器人上的4个定位顶脚伸向幕墙表面,对机器人本体进行稳固定位。
