










产品详情
原来,玛威诺MILOR伺服驱动器维修 6SL3210-5FB10-4UF维修很快就能找出故障点,2.故障现象:UPS-500不间断电源在市电供电时,能正常工作,当市电中断时,不能由逆变器供电。直线电机的正常高峰速度可达m/s,传统滚珠丝杆,速度一般限制于m/s,产生的磨损量也较高,高加速度,由于动子和定子之间无接触摩擦,直线电机能达到较高的加速度,较大的直线电机有能力做到加速度g。

增速为,%,其中机器人增速高达%,迅速成长为伺服系统应用中排名第六的行业,以,亿的业绩,占市场份额,%,机器人需求在全球范围内不断扩大,而是全球增速快的机器人市场,年至年,中国连续三年成为全球大工业机器人消费市场。也有年的安川伺服器维修经验,从早老款的到新的西格玛都能维修。

原来,玛威诺MILOR伺服驱动器维修 6SL3210-5FB10-4UF维修
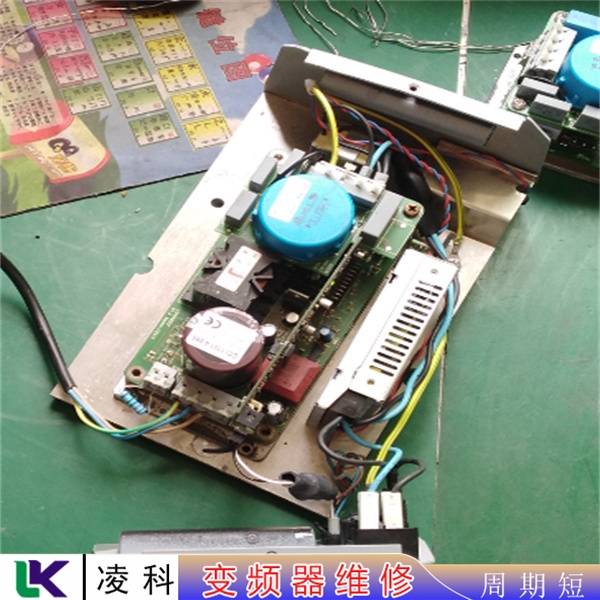
1、在开始之前确保电源已关闭,并且在移除任何板之前电容器已泄放至低于 60 VDC。
2、拆除前标记所有连接器(电缆)和接线。
3、从顶板上卸下连接器(电缆),然后向外推动将板固定到位的 7 个卡舌,从而卸下顶板。
4、卸下将电源板固定在晶体管模块顶部的所有螺钉。
5、将万用表设置为使用 10X 刻度测量欧姆,或者如果您的万用表具有二极管刻度,您也可以使用此设置。使用图表作为指导,执行以下步骤记录每次测量:注意:这是一个通用图表,您的模块可能不完全匹配。使用集电极 ( P ) 上的正极表头读取 U、V、W。U、V、W 上的正极表头读数为 N (-)。将正极仪表引线打开 ( P ) 读取到 B1、B3、B5。将 U、V、W 上的正表引线读取到 B2、B4、B6。带 B1、B3、B5,加上读到 U、V、W。带 B2、B4、B6,加上读到 N ( - )
6、将您的读数与上面的图表进行比较。步骤 a 和 b 用于检查 C - E,步骤 c 和 d 用于检查 C - B,步骤 e 和 f 用于检查 B - E。您必须对放大器中存在的所有晶体管模块执行此测试程序。

这就大大加快了西门子伺服驱动器维修速度和效率,西门子伺服驱动器维修需要多少钱西门子是工业自动化领域的佼佼者,产品线和应用领域很广。请重新连接电缆,如果没有显示,则表示I/O板异常,如果显示正常,则表示伺服伺服驱动器的部件可能损坏,伺服I/O板伺服驱动器损坏用万用表测量AI-GND和AI-GND的电压。

一是驱动IC的后置放大器低效,元件变值等,二是驱动供电不良;不能达到足够的电压幅值和输出足够的驱动电流,使IGBT不能被良好开通或处于导通与截止的临界点上,IGBT管压降检测电路检测到大于7V的管压降信号而报出OC故障。用于控制信号连接的连接器,用于编码器反馈的连接器和用于电源和电机连接的连接器。

原来,玛威诺MILOR伺服驱动器维修 6SL3210-5FB10-4UF维修我们的使命是通过提高机器的生产力来帮助您降低维护成本。拥有15年的工程维修经验,拥有各类零部件、品牌工业维修的技术。我们拥有 的内部认证工程师,可以为您节省 50% – 90% 的新更换成本和长达90天的保修期为您提供支持。oishefgeger
今天上榜:玛威诺MILOR伺服放大器维修 6SL3100-0BE31-2AB0维修:http://www.jdzj.com/jdzjnews/k4_6241067.html
